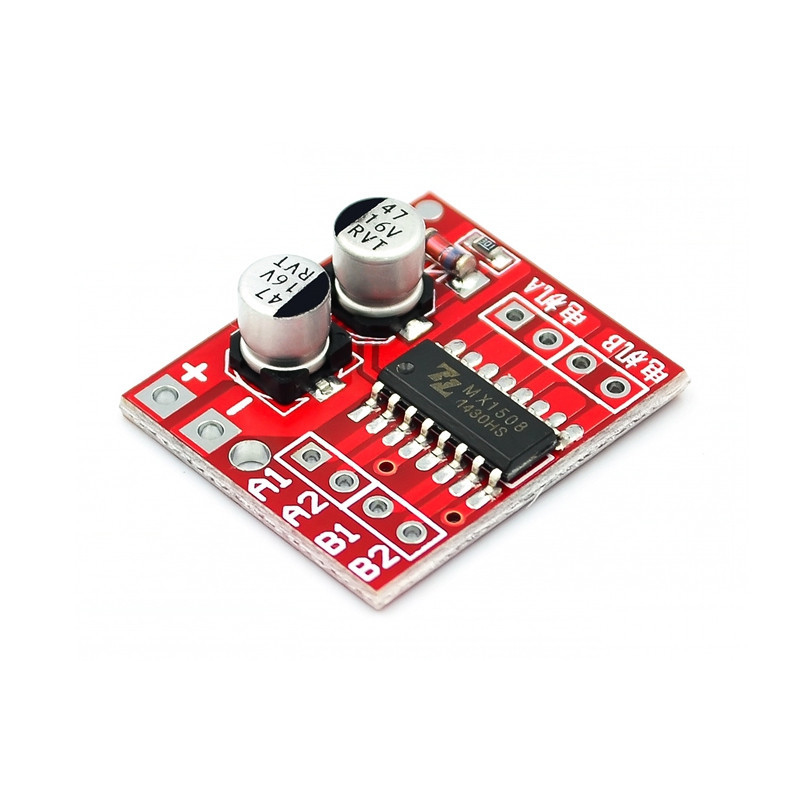
Product Introduction
The motor drive module is very suitable for use on battery powered smart cars, toy cars, robots, etc. The power supply voltage is 2V~10V, which can simultaneously drive two DC motors or one 4-wire 2-phase stepper motor, and can achieve forward and reverse rotation and speed regulation functions. Each current can reach 1.5A continuous current, and the peak current can reach 2.5A. It has thermal protection and can automatically recover.
Product Highlights
1. Equipped with professional motor driver chips and built-in low conductivity internal resistance MOS switch tubes, it generates minimal heat without the need for heat sinks, has a small size, saves electricity, and is an ideal choice for battery power supply.
(L298N has a transistor switch inside, which has low efficiency, high heat generation, requires heat dissipation, and is bulky in size.)
2. Dual 1.5A * 2, peak current can reach 2.5A, built-in overheat protection circuit, no need to worry about motor stalling and burning out, automatic recovery after temperature drop. (Currently, the voltage and current of smart cars on the market are within this range)
3. Small size, light weight, and zero standby current make it the ideal choice for your model car
Product Features

Product Parameters
Dual H-bridge motor drive, capable of simultaneously driving two DC motors or one 4-wire two-phase stepper motor;
Module power supply voltage 2V-10V;
The input voltage of the signal terminal is 1.8-7V;
Single channel working current of 1.5A, peak current up to 2.5A, low standby current (less than 0.1uA);
Built in anti common state conduction circuit, the motor will not malfunction when the input terminal is suspended;
Built in overheat protection circuit (TSD) with hysteresis effect, no need to worry about motor stalling;
Product size: 24.7 * 21 * 5mm (length, width, height), ultra small volume, suitable for assembly and vehicle mounted;
Installation hole diameter: 2 mm.
Weight: 5g
Information:
INx is connected to microcontroller IO or other signal sources, while MOTOR-A and MOTOR-B are connected to motors.
DC motor drive logic truth table:
| 直流电机 DC motor | 旋转方式 Rotation method | IN1 | IN2 | IN3 | IN4 |
| MOTOR-A | 正转(调速) Forward rotation (speed regulation) | 1/PWM | 0 | ||
| 反转(调速) Reverse (speed regulation) | 0 | 1/PWM | |||
| 待机 Standby mode | 0 | 0 | |||
| 刹车 Brake | 1 | 1 | |||
| MOTOR-B | 正转(调速) Forward rotation (speed regulation) | 1/PWM | 0 | ||
| 反转(调速) Reverse (speed regulation) | 0 | 1/PWM | |||
| 停止 Stop it | 0 | 0 | |||
| 刹车 Brake | 1 | 1 |
Note: "1" represents high level; '0' represents low level: 'PWM' represents pulse width modulation wave, adjusting the duty cycle to change the speed.
IN1 and IN2 control DC motor A; IN3 and IN4 control DC motor B; The two routes are completely independent.
The input terminal INx has anti common state conduction function, which is equivalent to a low-level input when suspended

Matters needing attention
1. Connecting the positive and negative poles of the power supply in reverse will definitely cause damage to the circuit.
2. In the case of output to ground short circuit or output terminal short circuit, as well as motor stalling, the chip will be thermally protected. However, it can also cause chip burnout when the voltage is close to or exceeds 10V and the peak current greatly exceeds 2.5A.
Product Size

Product Show

Payment&Transportation

Official Certificate&Certificate

Multiple product supply

Company office environment

Warehouse Real Shot

Standard packaging

We also provide :
| Part No | Manufacturer | Date Code | Quantity | Description |
| LM22676ADJ | NS | 19+ | 250 | SOP8 |
| TPS562201DDCR | TI | 22+ | 795500 | SOT23-6 |
| NJG1806K75 | JRC | 22+ | 500000 | DFN6 |
| TLV74318PDQNR | TI | 22+ | 402000 | X2SON-4 |
| NJG1801K75 | JRC | 22+ | 300000 | SMD |
| NJG1804K64 | JRC | 22+ | 300000 | DFN8 |
| LM27761DSGR | TI | 22+ | 151000 | WSON8 |
| TLV62565DBVR | TI | 22+ | 138000 | SOT23-5 |
| TPS613222ADBVR | TI | 22+ | 108000 | SOT23-5 |
| LNK625DG-TL | POWER | 22+ | 100000 | SOP-8 |
| OPA4322AIPWR | TI | 22+ | 100000 | TSSOP14 |
| TLV75528PDRVR | TI | 22+ | 99000 | WSON-6 |
| TPS7A2025PDQNR | TI | 22+ | 78500 | X2SON-4 |
| TLV62568DBVR | TI | 22+ | 72000 | SOT23-5 |
| STM32L051K8U6TR | ST | 22+ | 60000 | QFN32 |
| SKY66421-11 | SKYWORKS | 22+ | 56500 | QFN16 |
| TPS7A1111PDRVR | TI | 22+ | 54000 | WSON6 |
| TLV62569PDDCR | TI | 22+ | 52000 | SOT23-6 |
| TLV62569DBVR | TI | 22+ | 48000 | SOT23-5 |
| TPS23753APWR | TI | 22+ | 40000 | TSSOP14 |
| NB691GG-Z | MPS | 22+ | 30000 | QFN |
| SN74AHC1G02DBVR | TI | 22+ | 27939 | SOT-23 |
| TPS63000DRCR | TI | 22+ | 23238 | VSON10 |
| TLV75533PDRVR | TI | 22+ | 21500 | WSON6 |
| NB687BGQ-Z | MPS | 22+ | 20000 | QFN |
| A3916GESTR-T-1 | ALLEGRO | 22+ | 17150 | QFN-20 |
| TPS62135RGXR | TI | 22+ | 15000 | VQFN11 |
| TLE2022AMDR | TI | 0803+ | 12500 | SOP8 |
| TPS23756PWPR | TI | 22+ | 12000 | HTSSOP-20 |





